











Роботы – от фантастики к реальности
- Автор Александр Новинков
- Станьте первым комментатором!
Роботы, которые выражают и распознают эмоции, умеют общаться с людьми, сами усваивают новые знания и выполняют разные задачи. Если все это до недавних пор было только частью научной фантастики, то в последние годы все больше начинает превращаться в реальность. Заслуга этого – ученых со всего мира, искушенных вызовом создать искусственный интеллект.

Существует ли, однако, риск того, что человека заменит робот?
«Думаю, это не должно быть для нас целью, – уверен д-р наук Петр Кормушев. – Для начала, мы стремимся сделать роботов, которые могут быть очень хорошими ассистентами для людей и выполнять все те задачи, которые трудоемки, связаны с риском для здоровья или очень скучны и не имеет смысла, чтобы их осуществляли люди. А также задачи, в которых надо использовать большую силу. Например, в связи с событиями в Японии, была очень велика необходимость в машинах, которые бы помогали людям расчищать огромные завалы, искать людей под развалинами и т.д. Но основная цель роботики, по–моему, – создать в близком будущем искусственный интеллект, который мог бы придать роботам более высокую степень интеллигентности, чтобы они стали более адаптивными и один и тот же робот мог участвовать в выполнении разных типов задач, проще приспосабливался. До сих пор все, что сделано в роботике, очень тесно специализировано. Каждый робот проектируется едва ли не вручную для определенной задачи, для выполнения конкретной работы, и все еще нет такого универсального робота, который может быть использован для самых разных типов задач и ситуаций. Это труднодостижимо, но, мне кажется, будет основной целью в близкие 20, 30, 40 лет – создать более универсальных роботов».
Петр Кормушев окончил две магистратуры – «Искусственный интеллект» и «Био- и медицинская информатика» в Факультете по математике и информатике в Софийском университете Святого Климента Охридского. Окончил докторантуру в токийском Институте технологий. Его диссертация посвящена методам ускорения обучения роботов при использовании компьютерных симуляций. Предложенный им подход, названный Time Hopping/ Time Manipulation, многократно ускоряет обучение при симуляции и может использоваться для более эффективного обучения роботов. Молодой ученый – лауреат нескольких престижных премий. Около полутора лет работал постдокторантом в Итальянском институте технологий в Генуе.
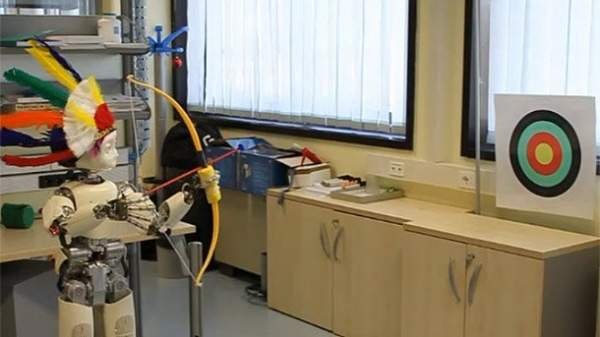
Его исследовательские интересы снова связаны с разработкой алгоритмов обучения и самообучения роботов: «Я занимаюсь двумя основными направлениями. Одно – обучение путем имитации, – пояснил д-р Кормушев. – В этом направлении я создаю алгоритмы, которые помогают роботу получать знания, демонстрируемые людьми. Могу привести пример эксперимента, который я проводил, – робот должен был переворачивать блины, сравнительно простая задача для большинства людей. После некоторых упражнений любой человек может научиться успешно переворачивать блины. Но для роботов эта, на первый взгляд, несложная задача исключительно трудна. Один из алгоритмов обучения, который я изготовил, помог тому, чтобы после 30-40 попыток робот научился переворачивать блины. Естественно, мы проводили и другие опыты в Итальянском институте технологий, где я работаю в данный момент. Второе направление связано с методами самообучения, в ходе чего робот сам находит способ, при помощи которого осуществить задачу. В этом случае нет демонстраций, нет имитации, нет человека, который продемонстрировал бы как надо выполнить задачу. Это сравнительно новый метод, и он позволяет роботу самому вычислить, какие действия необходимы для достижения цели, заданной человеком. Это довольно перспективный метод, у которого большое будущее, на мой взгляд, но все еще не достаточно разработанный в роботике. То, чего мне удалось добиться до сего момента, – научить нашего гуманоидного робота iCub в нашем Институте, стрелять из лука и попадать в центр мишени. Способ, по которому робот учится, очень похож на то, как бы этому учился ребенок. Робот начинает с нуля знаний в начале и постепенно сам учится тому, как держать правую и левую руку, чтобы выпустить стрелу и чтобы она достигла центра мишени. В сотрудничестве с профессором Драгомиром Недчевым, работающим в Токио, мы сделали робота, которого научили вытирать вертикальную поверхность, например, доску или окно. В этом случае мы использовали первый тип методов, посредством имитации, т.е. человек демонстрирует движение, которое робот должен освоить. После нескольких демонстраций робот овладевает движением и может воспроизвести эту задачу в разных условиях, например, на поверхности под разным углом, в разном положении и покрыть поверхность разной площади».

Каковы преимущества и приложение методов, над которыми работает молодой болгарский ученый?
«Основное преимущество в том, что однажды, когда роботы станут достаточно доступны и больше семей смогут купить себе робота для дома, то его владельцы смогут обучать его новым задачам, т.е. тому, что создатели робота никогда не предусматривали предварительно, - уточнил Петр Кормушев. – Роботы будут иметь достаточно большую гибкость в том, как они смогут использоваться. И это наша цель. Но пока дойдет до этого момента, пройдет еще немало лет, потому что все еще роботы очень дороги. Цена даже самых элементарных частей для робота, например, двигателей или трансмиссии, все еще очень высока. Небольшое пока число производимых роботов – другой фактор их высокой стоимости. Так что основное, что нужно сделать, – популяризовать роботов в ежедневной жизни, снизить их стоимость и, во-вторых, увеличить их гибкость, сделав их самообучающимися, чтобы люди могли их обучать выполнять разные задачи».
Перевод Елены Дымовой
Дополнительная информация
- Источник: Радио България